- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
2026.06.26
月面基地へ舵を切るNASA。日本の勝ち筋はロボットにあり【連載】世界基準で読む宇宙ビジネス
世界各国の宇宙産業の最前線を読み解き、日本企業の活路を探る本連載。第5回となる今回は、米国のアルテミス計画における最新の方針転換に焦点を当てます。NASAは2026年3月、月周回拠点であるGatewayから、月面での持続的な活動を支える基地構想へと重点を移す方針を示しました。この転換は、宇宙ビジネスに何をもたらすのでしょうか。本記事では、月面生活圏の形成と、それを支えるロボティクスの可能性を整理しながら、日本企業が見いだすべき勝ち筋を考えます。(解説=伊巻和弥/文=SpaceStep編集部)
解説するのは

株式会社2moon
伊巻 和弥 さん
新潟県上越市出身。宇宙業界で30年以上にわたり、有人宇宙飛行、人工衛星、および探査ミッションなど多彩なシステム設計・運用に従事。株式会社2moonを2023年に設立し、宇宙ビジネス参入支援、衛星打ち上げ支援、宇宙開発技術支援、地方創生・DX支援、企業コンサルティング、宇宙を活用したSTEM教育など幅広く展開。
これまで、米国の有人宇宙ミッションや国際宇宙ステーション(ISS)に関わるマニピュレータ開発・運用、月・火星探査プロジェクトの運用設計、そして衛星データを活用した地方自治体や産業向けの実証事業などを主導。深い技術知見と国際調整力、幅広いネットワークを背景に、40社以上のコンサルティング実績を持つ。
アルテミス計画の再構成──「行く」から「暮らす」へ
SpaceStep読者の皆さま、こんにちは。株式会社2moonの伊巻和弥です。今回のテーマである米国の宇宙産業の最新動向とNASAの方針転換について、まずは弊社で最高技術責任者を務める原田悟志から、その概要を解説します。

株式会社2moon 最高技術責任者
原田悟志 さん
2005年、日系航空会社入社。整備管理業務部門にて主に航空機のライン整備や重整備、機体返却整備の調達業務に6年従事。その後米国大学にて航空宇宙工学を学び2013年より宇宙業界へ。国際宇宙ステーションの運用管制官(熱環境制御系リード)を経て2018年にJAXAフライトディレクタに指名され、多数の有人宇宙ミッションを統括。現在はグローバル総合コンサルティングファームにて、宇宙やテクノロジー領域のコンサルティング業務に従事。新たな宇宙エコシステムにおいて、社会への持続可能な価値創造を生み出すという想いの下、2moonへの参画を決意。
皆さま、こんにちは。株式会社2moon 最高技術責任者の原田悟志です。ここからは私が、NASAの戦略的転換について解説してまいります。
大きな転換は、派手な演出ではなく、短い記者説明や一枚の資料更新から始まることがあります。2026年4月、Artemis IIが有人での月周回飛行を成功させ、世界中の注目を集めました。長く続いた技術的課題を乗り越え、NASAは、次の段階へ進むための大きな実証を一つ積み上げたと言えるでしょう。実はNASAは、この成功に先立つ2024年の段階で、「月への有人ミッションを年に約1回実施する」という方針をすでに明らかにしていました。Artemis IIの成功は、その方針に確かな現実味を与えた出来事だったと言えます。
さらに注目すべきは、NASAが2026年3月のライブイベント「Ignition」で、Artemis計画の重点を大きく見直す方針を示したことです。それは、月周回拠点であるGatewayから、持続的な月面活動を支える基地構想へと、開発リソースと目的を大きく移す判断でした。Gatewayについては、現行計画を一時停止し、既存のハードウェアや国際パートナーの貢献を月面活動に活用していく方針が示されました。あわせて、Artemis III以降のミッション構成も見直されています。これはすべて、「月面での持続的な活動」を中心に据えるための再構築でした。

出典:https://www.nasa.gov/ignition/
その背景には、いくつかの現実的な課題がありました。Gatewayは開発スケジュールや予算面で課題を抱えており、月面着陸システムであるHLS(Human Landing System)や宇宙船Orionを含むミッション全体の開発も、当初の想定より時間を要していました。また、月周回拠点を前提とした国際協力の枠組みは、複雑さを増すばかりでした。NASAはこれらを冷静に見つめ直し、「月周回よりも、月面そのものにリソースを集中すべきだ」と大きく舵を切ったと考えられます。
Artemis IIIは、当初想定されていた月面着陸ではなく、地球低軌道での統合システムや運用能力の検証を担うミッションへと位置づけ直されました。これにより、Artemis IVが有人月面着陸を担うミッションとして重要性を増しています。そして、Artemis V以降は、有人月面活動の頻度を高めていく運用へと移行します。これはNASAが、単発の月面着陸ではなく、継続的に月面へ到達し、活動できる体制づくりを優先し始めたことを意味しています。さらにNASAは、月面の南極域を中心に、持続的な活動を支える月面基地を段階的に構築する方針を打ち出しました。
NASAが示す月面基地構想では、月南極域を中心に、電力、通信、ローバー、資源利用、居住機能など、持続的な活動を支えるインフラの整備が段階的に描かれています。
月の極域に存在する氷資源や太陽光の条件を踏まえれば、NASAが慎重に基盤づくりへと舵を切った理由も十分に理解できます。月面は、もはや一時的な「行って帰る場所」ではありません。人間が滞在し、活動を継続し、やがて暮らす場所へと位置づけられ始めています。そこで浮かび上がるのが、人と同じ空間で働き、生活を支えるロボットという、日本企業が強みを発揮しやすい領域です。
月面生活圏はなぜ“必然”なのか──ロボティクスが切り拓く未来
Ignitionで示された方向転換により、月面開発は明確に「ロボティクス中心の建設フェーズ」へと入りました。NASAの月面基地構想でも、初期段階ではロボットミッションや技術実証を通じて、月南極域での活動基盤を整える方針が示されています。人間が到着する前に、電力、通信、移動手段、現地資源利用(ISRU)といったインフラ基盤をロボットが展開する。これがNASAの描く月面開発の第一歩です。
しかし、月面開発の最終的な目標は、単に基地を建てることそのものではありません。NASAが目指しているのは、持続的な有人活動を可能にする“生活圏”の確立です。この方向性は、国際的な月面構想とも重なり合っています。欧州宇宙機関(ESA)が提唱する「Moon Village」では、将来的に数百から1,000人規模のコミュニティが想定されています。NASAも具体的な人数こそ明言していないものの、長期滞在、多人数、多目的利用を前提としたインフラ整備を着々と進めようとしています。
人が月面で暮らすということは、そこに“社会”が生まれるということです。食事、睡眠、移動、医療、教育、娯楽など、人間が生きるためのあらゆる営みが月面でも必要になります。もちろん、建設ロボットや探査ローバーは不可欠です。しかし、月面で人が長く活動する段階に入れば、人と同じ空間で日々の生活を支えるロボットの重要性も高まっていきます。
NASAの月面基地構想は、3段階で整理されています。Phase 1(現在〜2029年)ではロボットミッションや技術実証を通じて月南極域での活動基盤を探り、Phase 2(2029〜2032年)では初期居住や物流、電力、通信などのインフラ整備へ進みます。そしてPhase 3(2032年以降)では、継続的な有人活動を支える段階へ移行していく計画です。
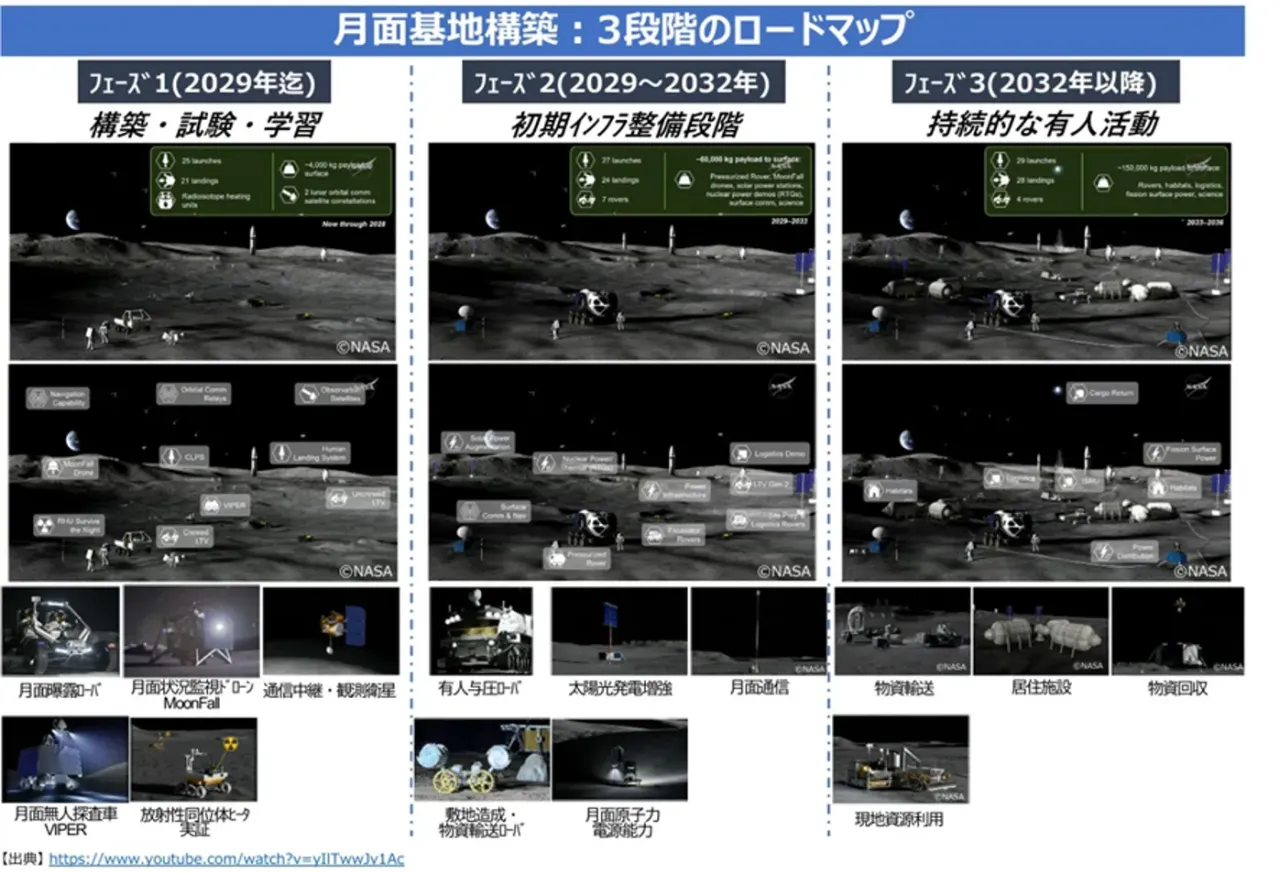 出典:https://www8.cao.go.jp/space/comittee/27-kagaku/kagaku-dai70/siryou5.pdf
出典:https://www8.cao.go.jp/space/comittee/27-kagaku/kagaku-dai70/siryou5.pdf
この流れを見れば、月面生活圏に求められるロボティクスは、単なる作業機械ではなく、人の暮らしを支える社会インフラに近づいていくことが見えてきます。人間が月面で暮らすためには、室内での移動、荷物の運搬、清掃や点検、医療や健康のモニタリング、危険環境での代替作業、そして船外活動(EVA)の補助といった、生活の根幹を支えるロボットが不可欠になります。これらは建設ロボットとは全く異なる領域であり、人間と同じ空間で、安全に、そして自然に動くことが強く求められます。つまり、月面生活圏のロボティクスは、“人間中心のロボット文化”を育んできた国が力を発揮しやすい領域だと言えます。
日本のロボット産業は、なぜこの月面生活圏にフィットするのでしょうか。日本は、ロボットを単なる機械ではなく、人の暮らしに寄り添う存在として描き、受け入れてきた文化的背景を持っています。その背景には、技術力だけでなく、私たちの文化、社会、歴史が深く関わっています。鉄腕アトムやドラえもんに象徴されるように、日本のロボット観の根底には“ロボットは人間の仲間である”という思想があります。一方、欧米では産業用途や軍事・防衛領域での発展が大きな位置を占めてきた面があり、日本のロボット観とは異なる文脈を持っています。
この文化的背景は、技術の方向性にも大きな影響を与えてきました。日本のロボット産業は、人と同じ空間で安全に動く協働ロボットや、高齢化社会を支える介護ロボット、精密制御と安全設計を極めた産業ロボットなど、“人間中心のロボティクス”を発展させてきました。これは偶然ではありません。日本社会は世界に先駆けて高齢化が進み、深刻な人手不足と安全性の両立という課題に直面してきました。その結果、「人とロボットが自然に共存する技術」が日々の生活の中で磨かれていったのです。月面生活圏でまさに求められているのは、この“人間中心のロボティクス”に他なりません。
では、日本企業は月面開発のどこで勝てるのでしょうか。建設ロボットの分野はすでに多くの国や企業が参入するレッドオーシャンです。ISRUは国家プロジェクトの色合いが強く、通信や航法は巨大なグローバル企業が独占しつつあります。一方で、月面での生活を支えるサービスロボットの領域は、建設や資源利用に比べると、まだ産業としての輪郭が十分に固まっていません。月面生活圏では、人間の生活を支えるためのロボットが大量に必要になります。
 株式会社2moon資料より引用
株式会社2moon資料より引用
しかし、この領域はNASAや欧米企業の取り組みにおいても、まだ“一つの産業”として明確に輪郭づけられているとは言えません。その背景には、ロボットを生活者に近い存在として設計し、社会に実装してきた経験の差があります。だからこそ、日本企業には、この領域で早い段階から存在感を示す余地があります。生活圏ロボティクスは、日本の技術、文化、社会構造が生み出した“独自の強み”が、そのまま世界での競争力になる領域です。この領域は、日本が宇宙産業の中で独自の存在感を示し得る、有力なチャンスの一つと言えるでしょう。
月面に1,000人住む時代とそれを支えるロボット・自動化技術
原田からはNASAの戦略転換と、日本のロボット産業が持つポテンシャルについて解説しました。ここからは私、伊巻から、さらに具体的な月面社会の未来像について解説していきます。
「月に1,000人が暮らす」と聞くと、まだSFのように感じる方も多いかもしれません。しかし、こうした未来像は、すでに複数の構想の中で語られ始めています。米国のULA社が提唱した「CisLunar-1000」構想では、30年後に1,000人が宇宙で生活し、働くという未来が描かれています。
 株式会社2moon資料より引用
株式会社2moon資料より引用
また、日本のispace社も「Moon Valley 2040」として、2040年代に月面に1,000人が暮らし、年間1万人が地球と月を往来する社会像を掲げています。さらにJAXAがまとめた「日本の国際宇宙探査シナリオ案2025」においても、2040年代の月面活動がより具体化されており、有人与圧ローバーによる広域探査や、将来的な月面拠点の姿が明確に示されています。つまり、月面1,000人社会は「いきなり出てきた夢」ではなく、世界の官民が描く構想の延長線上に、少しずつ輪郭を見せ始めている未来像だと言えます。
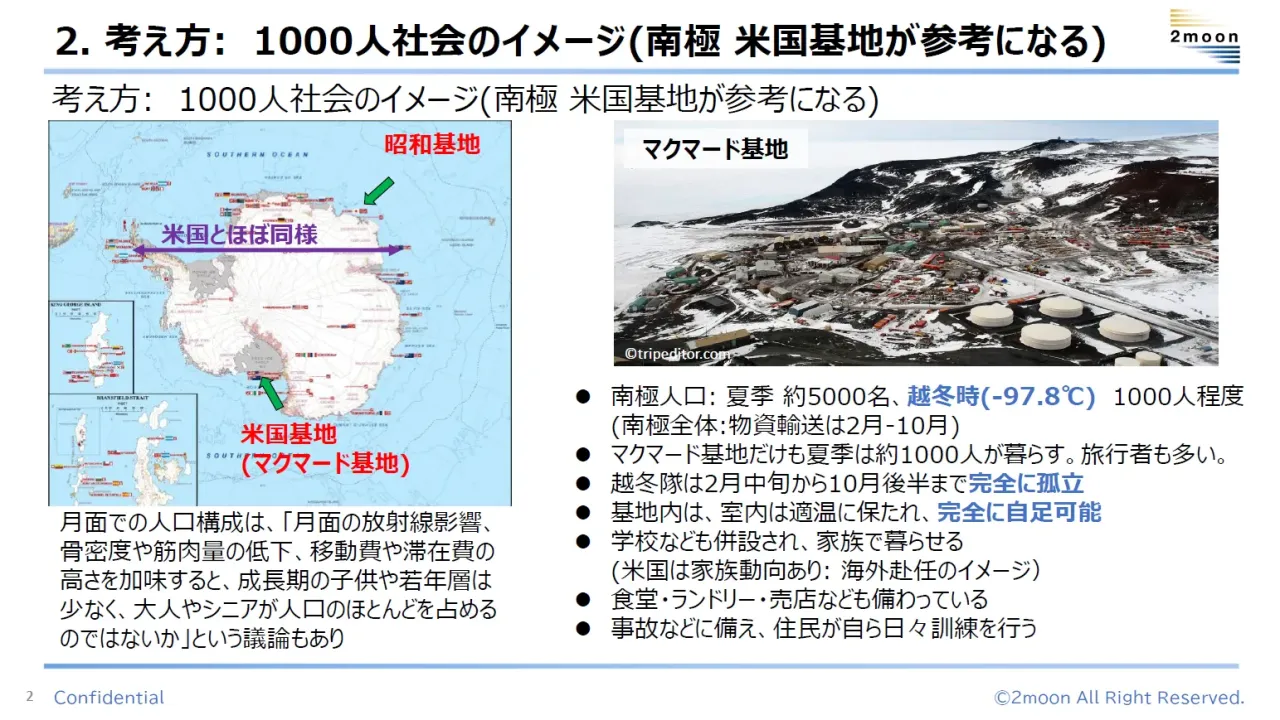
この未来を現実的に考えるうえで、非常に参考になるのが南極の存在です。米国のマクマード基地は、夏季には最大で約1,100人、冬季にも約200人が滞在する極限環境の拠点として運用されています。年間では約2,300人が行き来し、食事、燃料、発電、医療、物流といったインフラを備えた「小さな町」に近い拠点として機能しています。南極全体で見ても、季節によって多くの研究者や支援スタッフが滞在し、極限環境の中で社会的な機能を維持しています。月面は南極よりもはるかに過酷な環境ですが、孤立した環境で人が働き、暮らし、補給を受けながら社会的な機能を維持する実例は、すでに地球上に存在しているのです。
 株式会社2moon資料より引用
株式会社2moon資料より引用
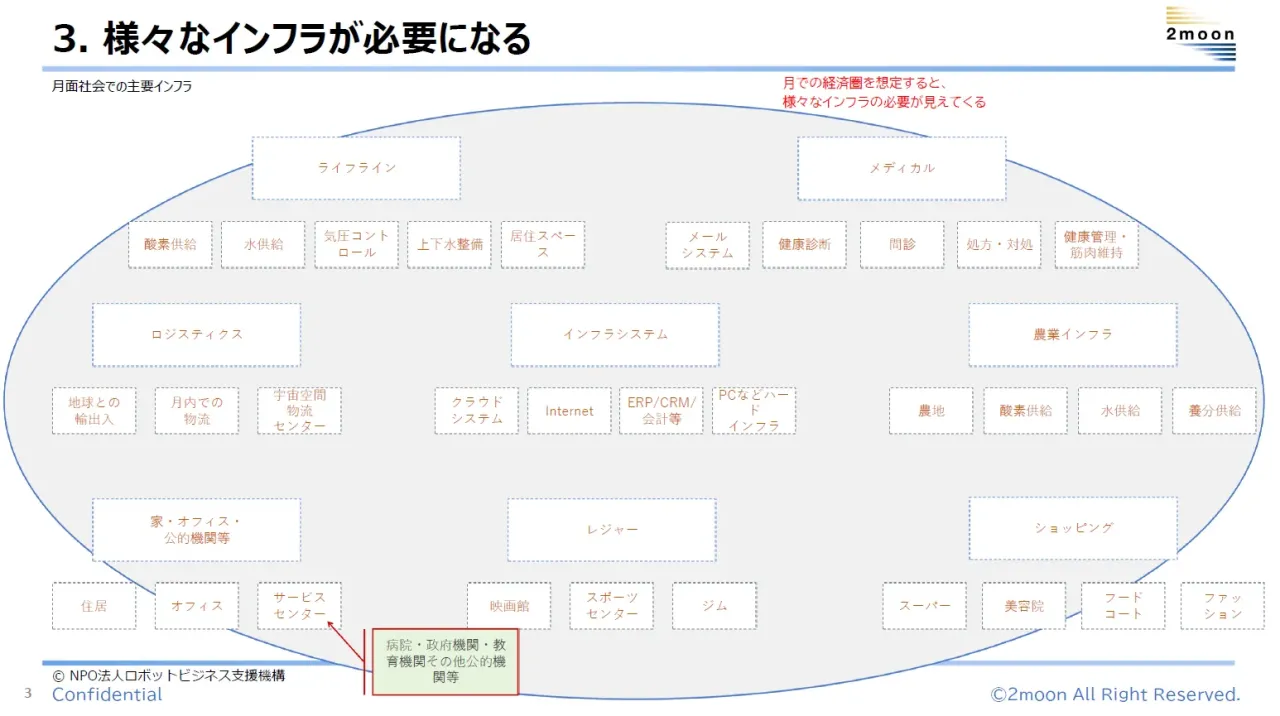
もちろん、月面社会の本質は単に「生き残ること」ではありません。1,000人が長期滞在するとなれば、必要なのは酸素や水、食料、電力だけではないのです。住まい、医療、教育、余暇、運動、ファッション、コミュニティの形成、メンタルケア、さらには物資の受け取りや清掃、洗濯まで含めて、「普通に暮らす」ためのQoL(生活の質)の向上が不可欠になります。訓練された宇宙飛行士だけでなく、技術者、医師、料理人、教育者、観光客、そして短期の出張者などが混在する社会になれば、月面拠点は、単なる探査基地ではなく、小さな都市に近いシステムとして設計する必要が出てきます。
 株式会社2moon資料より引用
株式会社2moon資料より引用
では、1,000人が月で快適に暮らすために、一体どれくらいのロボットが必要になるのでしょうか。ここで重要なのは、「ロボット=人型(ヒューマノイド)ロボット」という固定観念にとらわれないことです。月面社会で必要となるのは、人型ロボットだけではありません。建設機械、搬送ロボット、点検用のドローン、緻密な作業を行うロボットアーム、自動倉庫システム、食料を確保する植物工場、医療支援装置、自律型の清掃機、膨大なデータを集めるセンサネットワーク、そして、それらすべてを統合して管理する都市OSです。
具体的な前提を置いて考えてみましょう。人口1,000人の内訳は、常駐スタッフや長期滞在者が中心となり、そこに短期出張者や観光客が加わると想定します。居住区は複数の与圧モジュールで構成され、温室、医療区画、倉庫、発電・蓄電設備、月面車の車庫、通信設備、そして廃棄物処理設備などが整備されます。
外部にさらされたエリアでは、広大な太陽光パネル、送電網、宇宙船の着陸場、道路に相当する走行路、放射線などから身を守る防護壁、資源の探査・採掘設備、そして採取した水氷を処理する工場が稼働し続けます。さらに月面では、昼と夜がそれぞれ約2週間ずつ続き、細かい砂(レゴリス)はあらゆる機構部の隙間に入り込み、地球との通信には一定の遅延が生じ、万が一事故が起きても地球からすぐに助けが来るわけではありません。
このような厳しい条件のもとで、人がすべての作業を直接担うことは現実的ではありません。現在のISSでさえ、宇宙飛行士の1日の作業時間は分刻みで厳密に管理されており、実験や保守、運動、会議、そして生活維持作業に多くの時間が割かれています。月面で1,000人が暮らす場合も、全員がインフラの保守要員になるわけにはいきません。
むしろ人間は、高度な判断、研究、設計、医療、教育、複雑なサービス、そして緊急時の対応といった、人にしかできないタスクに集中すべきです。危険を伴う作業、単調な反復作業、長時間の監視、定型的な点検などは、ロボットが担うべき領域となります。
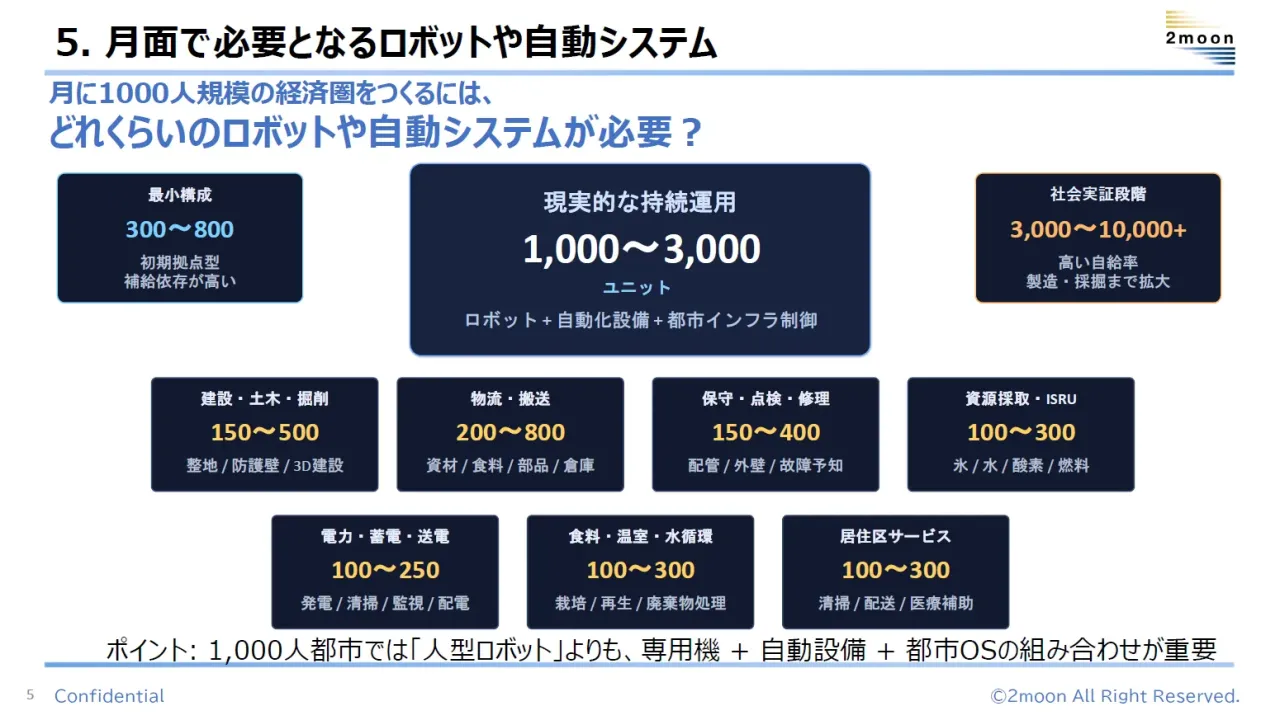
そのため、月面1,000人都市を現実的かつ持続的に運用していくためには、ロボット、自動化設備、都市インフラ制御を合わせれば、少なくとも「1,000〜3,000ユニット規模」のシステムが必要になると見込まれます。ここでいう1ユニットとは、1台の移動ロボットにとどまらず、固定式の自動設備、ロボットアーム、点検センサ群、温室の自動栽培モジュール、電力の制御セルなども含んだ単位です。
最小構成の初期拠点であれば300〜800ユニット程度でも運用は可能ですが、地球からの補給への依存度が高く、故障時の余裕は極めて小さくなります。逆に、製造、採掘、資源利用までを月面で行い、自給率を飛躍的に高めていくのであれば、将来的には3,000〜10,000ユニット規模へと拡大していく可能性もあります。
 株式会社2moon資料より引用
株式会社2moon資料より引用
月面においては、物流ロボットが止まれば食料や不可欠な部品が届かず、清掃ロボットが止まれば有害なレゴリスや粉塵が蓄積し、点検ロボットが止まれば重大な故障の予兆を見逃すことになります。月面都市において、ロボットは人間の手足となる道具にとどまらず、社会の機能を止めないためのインフラそのものになっていきます。
宇宙用ロボットの開発状況と日本が狙うべき勝ち筋
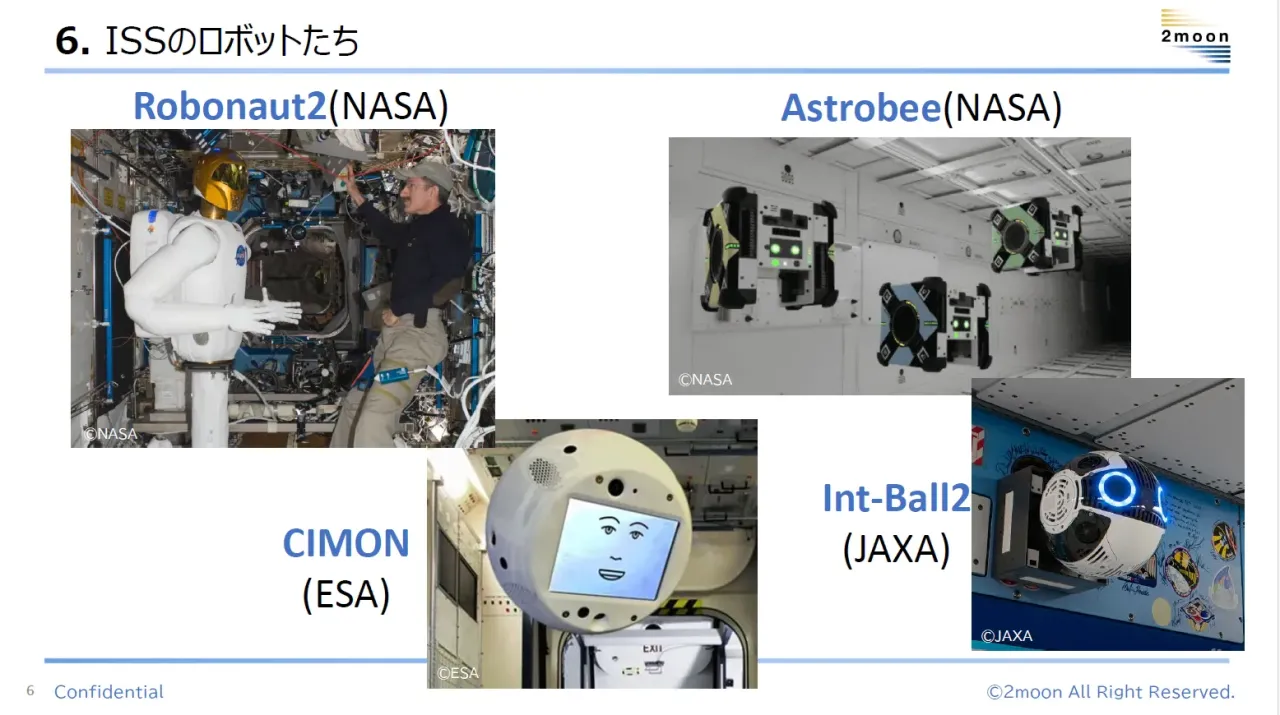
宇宙用ロボットの実装例は、すでに地球周回軌道を飛ぶISSにあります。日本の代表例としては、JAXAが開発した自律飛行型のカメラロボット「Int-Ball2」が挙げられます。これはISSの「きぼう」日本実験棟で活用され、宇宙飛行士の撮影作業を支援するだけでなく、ユーザー開発プログラムを試す技術実証の基盤としても位置づけられています。
 株式会社2moon資料より引用
株式会社2moon資料より引用
海外製では、NASAの「Astrobee」があります。これもISS内を自由に飛行するロボットであり、宇宙飛行士が定型的な作業に費やす時間を減らし、人にしかできない重要な業務に集中できるよう支援するロボットです。
ISSの外側に目を向けると、カナダが開発した「Canadarm2」や「Dextre」が、宇宙ステーションの複雑な組立や保守、船外機器の交換作業を支えてきました。近年では、日本発のスタートアップであるGITAI社も、ISSの船外で自律型デュアルロボットアームを用いた宇宙サービス、組立、製造に関する技術実証を成功させています。ISSは、宇宙飛行士とロボットが役割を分担する運用の実験場でもあったと言えます。
月面向けのロボット開発も、現在急速に加速しています。日本では、JAXA、タカラトミー、ソニー、同志社大学が共同開発した超小型の変形型月面ロボット「SORA-Q」が、探査機SLIMに搭載されて月面に到達し、変形・走行・撮影を行ったことで、日本の月面探査を象徴するロボットとなりました。玩具開発で培われた変形機構、民生向けの小型センサ、画像処理技術、そして宇宙開発の知見を組み合わせたこの事例は、日本ならではのオープンイノベーションの象徴とも言えます。
米国では、宇宙飛行士が月面で利用する非与圧の月面車(LTV:Lunar Terrain Vehicle)について、NASAが商業企業3社を選定し、民間サービスとして月面モビリティを整備しようとしています。また、NASAのJPLが進めるCADREプロジェクトでは、複数の小型ローバーがメッシュ通信で互いに協調し、自律的に月面を探査する技術実証が行われています。月面ロボットは、単独で走行する探査車から、複数台が協調して判断・行動するロボットチームへと進化しつつあります。月面都市づくりの初期段階では、宇宙飛行士よりも先に、整地し、施設を建て、保守を行うロボットが重要な役割を担う可能性が高いと言えます。
海外では、米国、欧州、中国が宇宙ロボット開発を加速させています。米国はアルテミス計画のもとで、月面車や建設、資源利用、自律ロボットを商業企業と連携して進めています。欧州はESAの宇宙探査ビジョン「Terrae Novae」において、ロボットを有人探査の先行偵察役として明確に位置づけています。
そして中国は、国際月面研究ステーション(ILRS)を2035年までに構築する構想を示しており、同時に政府主導でヒューマノイドロボット産業の育成にも強く踏み込んでいます。
地球上で量産されるヒューマノイド技術が、将来的に月面の与圧空間内での清掃や搬送、介助などに転用される流れは十分に考えられ、月面社会のサービスロボット競争において中国は決して無視できない存在となるでしょう。
有力なプレイヤーが競争を強める中で、日本はどこに焦点を当てるべきなのでしょうか。私は、大型で目を引くロボットを開発するよりも、常に動き続け、簡単に修理ができ、そして何より人と協調できる「サービスロボット群」にこそ、日本の確かな勝機があると考えています。
理由は明確です。月面1,000人社会で不足しやすいのは、人に近い場所で安全に働き、生活を支えるロボットだと考えられるからです。月面での生活が本格化したときに必要になるのは、居住区を清潔に保ち、食事の準備を支え、必要な薬を届け、人々の体調を見守り、トラブル時には避難経路を案内するような、誰にでも使いやすいロボットです。これは宇宙開発という特殊な文脈にとどまらず、介護、医療、物流、災害対応といった、日本社会が現在直面している課題とも重なり合っています。
特に重要となるのが、日米合意により日本が開発を担う「有人与圧ローバー」です。これは単に月面を走る車ではありません。宇宙飛行士が内部で生活できる動く住居であり、実験室であり、いざという時のシェルターでもあります。日本が深く関与する、有人宇宙活動の中核的なシステムと言ってよいでしょう。限られた空間の中で、乗員の健康や睡眠、メンタル状態を支えながら、外部ではロボットアームなどが定型作業を担う。こうした「人の近くで働くロボット」の設計思想は、日本企業が長年培ってきた安全性、高い品質、保守のしやすさ、ユーザーインターフェースの工夫、そして現場改善の文化と非常に相性が良いのです。
もうひとつの勝ち筋は、優れたロボット単体を開発するだけでなく、月面社会における設計・運用の「標準(スタンダード)」を握ることです。月面では各国や各企業の多種多様なロボットが同じ居住区や通路、通信網を使います。メーカーごとに操作体系や緊急停止の手順が異なれば、事故のリスクは高まります。日本はこれまでのISS「きぼう」の運用実績や、多様なロボット開発の経験をつなぐことで、宇宙用サービスロボットの国際的な標準化を主導できる可能性があります。
月面に1,000人が暮らす社会は、まだ遠い未来に見えるかもしれません。しかし、世界の宇宙開発は、その前提を少しずつ具体化し始めています。そこで真に問われるのは、「月に行けるかどうか」ではなく、「月で社会の機能を止めずに、安全に運用し続けられるか」です。ロボットは月面都市を支える道具にとどまらず、社会機能を維持する重要な構成要素になっていきます。日本が狙うべきは、月面で人の暮らしを根本から支える、信頼性の高いサービスロボット群と、その設計・運用標準を確立することです。宇宙に憧れる時代から、宇宙での暮らしを具体的に設計する時代へ。月面ロボットは、その転換点に立つ日本にとって、重要な勝ち筋に成り得るのです。
今回も最後までお読みいただき、ありがとうございました。次回は、2026年7月に開催される「SPACETIDE」を起点に、世界基準で宇宙ビジネスの現在地を考察していきます。お楽しみに。



- share
-

-

-